8강. 제어시스템의 설계
추천글 : 【제어이론】 제어이론 목차
1. PID 제어 [목차]
⑴ 비례 제어기(proportional controller)

⑵ 적분기(integral controller)

⑶ 미분기(derivative controller)

⑷ PD 제어기(PD controller)

Figure. 1. PD 제어기를 갖는 제어시스템

① 특징
○ derivative control은 e(t)의 기울기를 측정함
○ 특성방정식의 차수를 바꾸지 않고 영점을 추가함
○ 영점(zero)이 추가되어 근궤적이 이동함 (∵ 근궤적은 영점에 대해서 그려짐)
○ KD는 고유 진동주파수 ωn에 영향을 주지 않음
○ damping을 개선하고 maximum overshoot을 줄임
○ rise time과 settling time을 줄임
○ jωKD 항을 추가하여 bandwidth를 키움
○ gain margin, phase margin, Mr을 개선함
○ 높은 주파수에서 노이즈가 심해짐
○ 실제 회로 구현에서 상대적으로 큰 커패시터를 필요로 함
② 응용 : High-pass Filter
⑸ PI 제어기(PI controller)

Figure. 2. PI 제어기를 갖는 제어시스템

① 특징
○ 특성방정식의 차수가 변하여 약간 불안정해짐
○ PD 제어기와 달리 정상상태 오차를 제거할 가능성이 있음
○ damping을 개선하고 maximum overshoot을 줄임
○ rise time을 증가시킴
○ bandwidth를 감소시킴
○ gain margin, phase margin, Mr을 개선함
○ 높은 주파수에서의 노이즈를 제거함
② 예 : Low-pass Filter
⑹ PID 제어기(PID controller)
① 특징
○ KP : overshoot은 증가. settling time은 minimal impact. steady-state error은 decrease
○ KI : overshoot은 증가. settling time은 증가. steady-state error은 remove
○ KD : overshoot은 감소. settling time은 감소. steady-state error은 no impact
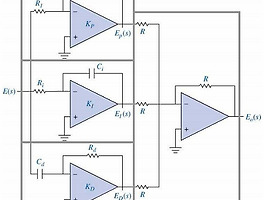
② PID 제어기 회로도


③ serial PID


④ parallel PID


⑤ standard PID : mixed PID, ideal PID라고도 함


2. PID tuning method : Ziegler-Nichols tuning method라고도 함 [목차]
⑴ manual PID tuning : 중첩의 원리를 이용함
① 단계 1. KD = KI = 0으로 둔 뒤 진동하기 직전의 KP를 결정
② 단계 2. 정해진 방법(manual) 하에 KP'을 결정하고 KP를 KP' 또는 0.5 KP'으로 설정
③ 단계 3. 비슷하게 KD를 결정
④ 단계 4. 비슷하게 KI를 결정
⑤ 단점 : KP, KD, KI 간 상관관계가 없다는 비현실적인 가정을 이용함
⑵ Ziegler-Nichols PID controller gain tuning using closed-loop concepts

Table. 1. Ziegler-Nichols PID controller gain tuning using closed-loop concepts
(Copyright ⓒ 2011 Pearson Education, Inc. Publishing as Prentice Hall)
⑶ Ziegler-Nichols PID conroller gain tuning using open-loop concepts

Table. 2. Ziegler-Nichols PID controller gain tuning using closed-loop concepts
(Copyright ⓒ 2011 Pearson Education, Inc. Publishing as Prentice Hall)
⑷ (참고) parallel controller 셋팅 : 추후 어떤 셋팅인지 자세히 기술할 예정

Figure. 7. typical open-loop step response of a process
① P 컨트롤러 셋팅

② PI 컨트롤러 셋팅

③ PID 컨트롤러 셋팅

④ 이 셋팅은 Ti와 Td를 과소평가하여 시스템을 매우 underdamped하게 만듦 : 다음과 같이 수정할 수 있음

⑸ (참고) standard controller 셋팅 : 추후 어떤 셋팅인지 자세히 기술할 예정
① P 컨트롤러 셋팅

② PI 컨트롤러 셋팅

③ PID 컨트롤러 셋팅

④ 다음과 같이 수정할 수 있음

입력: 2020.05.26 14:33
'▶ 자연과학 > ▷ 제어이론' 카테고리의 다른 글
| 【제어이론】 제어이론 목차 (4) | 2020.06.13 |
|---|---|
| 【제어이론】 7강. Frequency-domain Response (4) | 2020.06.09 |
| 【제어이론】 6강. 근궤적 (2) | 2020.05.26 |
| 【제어이론】 5강. Time-domain Response (0) | 2020.05.02 |
| 【제어이론】 4강. 제어시스템의 안정성 (2) | 2020.04.17 |



최근댓글