5강. Time-domain Response
추천글 : 【제어이론】 제어이론 목차
1. 퍼포먼스 파라미터 [목차]
⑴ 파라미터 정의

Figure. 1. 단위 계단 입력에 대한 제어 시스템의 시간 도메인 퍼포먼스
① 표준형 2차 시스템 : 고유 진동주파수 ωn, 감쇠비 ζ에 대하여,

② 지연 시간(delay time) : 최종 값의 50%에 이르는 시간. td로 표시함
③ 상승 시간(rise time) : 최종 값의 10%와 90%에 이르는 시간 차이. tr로 표시함
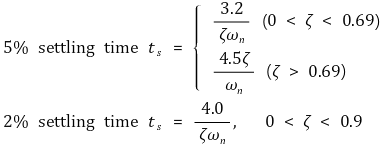
④ 조정 시간(setting time) : 출력 신호가 목표치로부터 5% 이내에서만 도달하게 되는 최초의 시간. ts로 표시함
⑤ 정상상태 오차(steady-state error) : 목표치 - 출력 신호의 수렴값
⑥ 최대 오버슛(maximum overshoot) : 출력 신호가 목표치로부터 최대로 얼머나 벗어나는지를 지칭. 미분을 통해 구함

⑦ PO(percent maximum overshoot)

⑧ 피크 시간 : 최대 오버슛에 이르는 시간. tp로 표시함
⑵ 정성적 분석

Figure. 2. 제어시스템의 정성적 분석의 세 가지 경우
① 개요
○ σ는 시간 상수의 역수와 관련이 있음. (∵ exp(-σt) = exp(-t/τ))
○ ζ가 클수록 진동 정도가 더 심해짐
○ 일반적으로 오버슛과 반응속도의 트레이드 오프에서 ζ = cos 45° = 0.707을 맞춤

② 경우 1. σ는 일정하고 jω가 증가하는 경우
○ ωn = √(σ2 + ω2)은 증가함
○ PO는 진동의 정도 ζ와 관련 있으므로 경우 1에서는 증가함
○ tr은 고유 진동수와 관련 있어서 감소함 (∵ 초기 퍼포먼스와 관련 있어서 시간 상수, 진동 정도가 함께 관여함)
○ ts는 시간 상수와 관련 있어서 대략 일정함 (∵ 진동은 어차피 계속 일어나는 거라 크게 중요하지 않음)
③ 경우 2. σ와 jω가 일정하게 증가하는 경우
○ ωn = √(σ2 + ω2)은 증가함
○ PO는 진동의 정도 ζ와 관련 있으므로 경우 2에서는 대략 일정함



○ tr은 고유 진동수와 관련 있어서 감소함 (∵ 초기 퍼포먼스와 관련 있어서 시간 상수, 진동 정도가 함께 관여함)
○ ts는 시간 상수와 관련 있어서 감소함
④ 경우 3. jω는 일정하고 σ가 증가하는 경우
○ ωn = √(σ2 + ω2)은 증가함
○ PO는 진동의 정도 ζ와 관련 있으므로 경우 3에서는 감소함
○ ts는 시간 상수와 관련 있어서 감소함
⑶ 정량적 분석 : 표준형 2차 시스템은 다음과 같은 관계식이 성립함
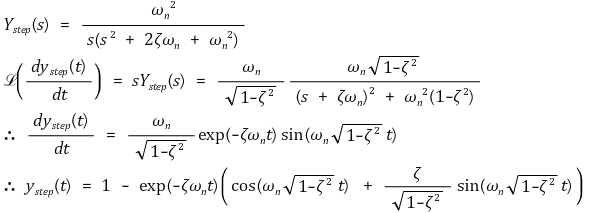
① 상승 시간(rise time)

② 조정 시간(settling time)
③ 최대 오버슛(maximum overshoot)

④ 정정 시간(peak time) 또는 첨두 시간

2. 제어시스템의 유형 : 정상상태 오차와 관련 있음 [목차]
⑴ 시스템 형을 결정하는 데 사용되는 단위 피드백 제어 시스템

Figure. 6. 시스템 형을 결정하는 데 사용되는 단위 피드백 제어 시스템

① 제0형 : j = 0인 경우 (예 : speed control system)
② 제1형 : j = 1인 경우 (예 : position control system)
③ 제2형 : j = 2인 경우
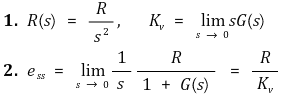
⑵ 계단함수입력에 대한 시스템의 정상상태오차

Figure. 7. 계단함수입력에 대한 시스템의 정상상태오차

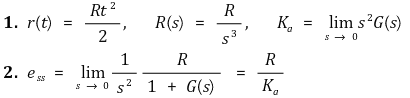
⑶ 램프함수입력에 대한 시스템의 정상상태오차

Figure. 8. 램프함수입력에 대한 시스템의 정상상태오차
⑷ 포물선함수입력에 대한 시스템의 정상상태오차

Figure. 9. 포물선함수입력에 대한 시스템의 정상상태오차
⑸ 시스템의 형에 따른 정상상태오차

입력: 2020.05.02 01:00
'▶ 자연과학 > ▷ 제어이론' 카테고리의 다른 글
| 【제어이론】 7강. Frequency-domain Response (4) | 2020.06.09 |
|---|---|
| 【제어이론】 6강. 근궤적 (2) | 2020.05.26 |
| 【제어이론】 4강. 제어시스템의 안정성 (2) | 2020.04.17 |
| 【제어이론】 3강. 제어시스템의 표현 (0) | 2020.04.17 |
| 【제어이론】 2강. 제어시스템의 설계 (0) | 2020.04.17 |




최근댓글